

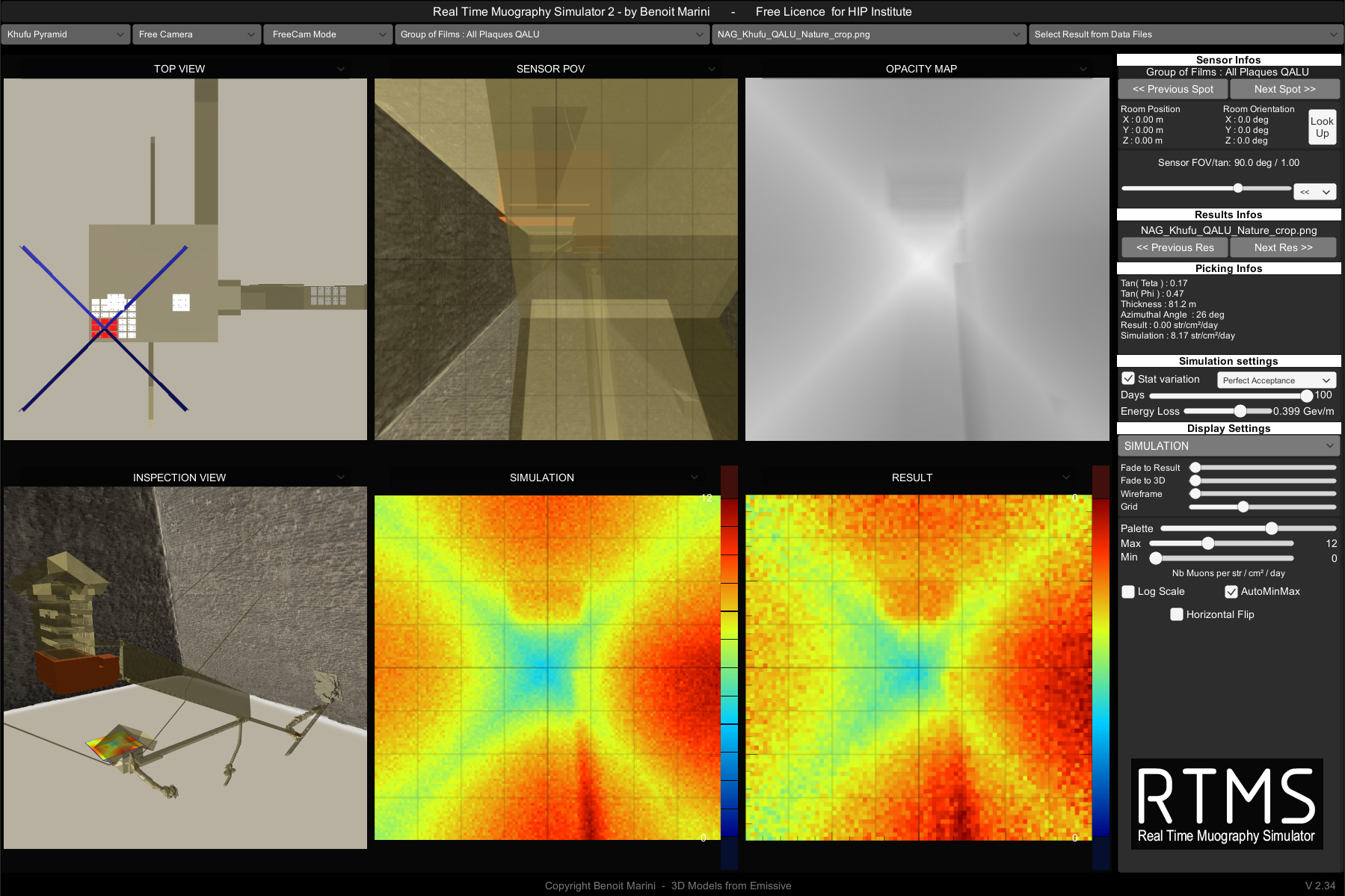
3DVF : Une autre partie de ton travail, essentielle pour la mission, a été la conception d’un outil d’analyse en 3D temps réel sous Unity. Concrètement, que permet de faire cet outil ? Pourquoi avoir fait un simulateur ?
Benoit Marini : Avant tout, il est important de comprendre qu’un résultat de muographie peut être compliqué à lire et à analyser, même pour des experts. Une muographie n’est qu’une image en 2D qui représente l’absorption des muons ayant traversés une structure en 3D. La difficulté est donc de pouvoir interpréter cette image.
Faire des simulations a deux avantages principaux : cela permet de rapidement comprendre ce que l’on voit en identifiant l’impact d’une structure existante sur l’image, mais également de faire une analyse, puisqu’une différence entre cette image simulée et un résultat réel de la muographie met en évidence un excès de muons et donc un vide dans une direction donnée (ou à l’inverse indique une surdensité de matière s’il y a un manque de muons).
Pour faire des simulations de muographie, les chercheurs utilisent habituellement un logiciel appelé Geant4 qui utilise un processus de type Monte Carlo. Cette méthode s’inspire de ce qui se passe dans la nature : des muons virtuels sont émis depuis le ciel et traversent un modèle 3D pas à pas en appliquant les lois physiques d’interaction avec la matière. C’est un processus lent et qui n’est pas adapté pour des modèles 3D très détaillés. L’analogie avec le monde du rendu 3D serait un moteur de pur photon tracing : on lancerait des milliards de photons depuis des lumières en espérant qu’ils atteignent le capteur de la caméra pour former une image.
Les premières simulations de la mission avaient donc été calculées par un réseau d’ordinateurs et pris plusieurs heures. Ces temps de calculs rendaient toute interaction en réunion impossible. Le besoin d’un simulateur en temps réel est né à ce moment-là.
J’ai alors cherché si l’on pouvait aborder les problèmes de l’interaction des muons avec la matière d’une autre manière pour accélérer les calculs. J’avais aussi très envie d’intégrer dans notre processus de travail de la visualisation 3D temps réel, à mon sens le meilleur langage pour imaginer et échanger nos avis concernant la structure interne de la pyramide. La méthode est née de la rencontre entre mes connaissances globales de la 3D et mes connaissances en physique que j’ai affiné auprès des experts de la mission.
Une fois que le premier prototype sous Unity a permis de valider la méthode, il a été étoffé avec une interface et des outils. Baptisé RTMS (Real Time Muography Simulator), cet outil permet maintenant de travailler ensemble lors de réunions, de manière interactive.
Grâce à ce simulateur, il est dorénavant possible :
• De comprendre et interpréter les résultats même pour des non experts ;
• De confronter les résultats aux simulations ;
• De formuler des hypothèses architecturales ;
• D’optimiser les placements des télescopes.
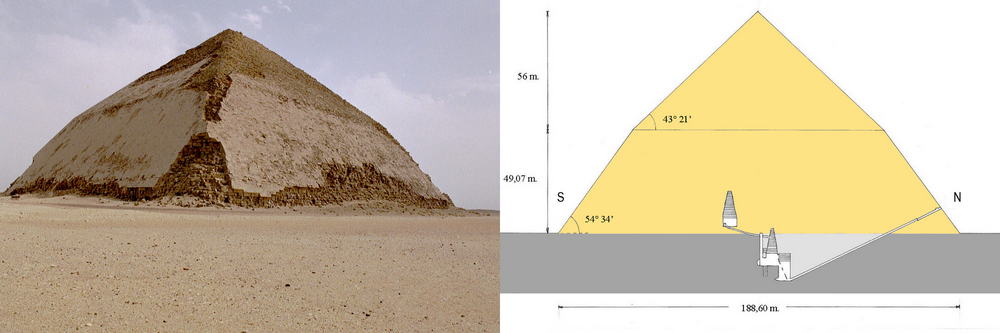
Ci-dessus, à droite : Plan en coupe des appartements funéraires de la pyramide rhomboïdale de Snéfrou à Dahchour. En blanc au centre, les chambres internes.
illustration de Franck Monnier – licence Creative Commons Attribution.
3DVF : Comment ce simulateur a-t-il permis de valider la méthode du scan à muons ?
Nous devions d’abord prouver que la muographie fonctionnait et pour cela il fallait être capable de détecter un vide connu. L’équipe de l’université de Nagoya a placé des détecteurs dans une chambre basse de la pyramide rhomboïdale avec l’objectif de détecter la chambre haute. Lorsque nous avons eu les résultats, le simulateur a permis, entre autres, de valider que la tâche qui apparaissait correspondait bien à cette chambre et qu’il n’y avait pas d’autres vides de même volume dans la pyramide. Ces validations effectuées, nous avons pu ensuite passer sur la pyramide de Khéops.
3DVF : Peux-tu revenir sur le développement du simulateur, et notamment sur les raisons du choix de la plateforme Unity ?
Venant du monde de la création d’expérience 3D, l’idée d’utiliser un moteur 3D me semblait pertinente. Je ne suis pas programmeur à la base mais j’ai une bonne connaissance des algorithmes et l’idée d’utiliser un moteur de jeu me semblait pertinente pour avancer vite sur le prototypage des concepts.
Cette approche de simulation, complètement différente des processus classiques, impliquait de nouveaux besoins : faire des rendus avec des shaders particuliers, stocker les résultats intermédiaires dans des textures flottantes (32 bits), concevoir une interface simple d’utilisation, charger et enregistrer des données, faire un affichage multifenêtre… et bien entendu avoir une visualisation 3D. Unity s’est avéré très flexible pour faire rapidement un premier prototype. Une fois la méthode validée, j’ai étoffé le simulateur en ajoutant des outils d’analyse. L’outil est toujours en évolution à l’heure actuelle.
3DVF : Le documentaire « Kheops – Mystérieuses découvertes » diffusé récemment sur France 5 insistait sur les performances de ce simulateur, nettement supérieures à celles d’outils existants.
Comment es-tu parvenu à obtenir un système réellement interactif ? S’agit-il de simplifications mathématiques, d’une approche technique différente ?
Je ne qualifierais pas mon simulateur de nettement supérieur à Geant4 car il est légèrement moins précis, en ne prenant pas encore en compte la dispersion multiple, c’est-à-dire le fait que les muons peuvent légèrement dévier d’une trajectoire rectiligne. Par contre, il est nettement plus rapide, au moins d’un facteur un million. Dans tous les cas Geant4 était utilisé lorsqu’il fallait finalement revalider une simulation, c’est la référence pour des physiciens.
La communauté 3D connait bien l’opposition entre 3D temps réel et les images 3D issues de longs temps de rendu qui offrent une qualité supérieure. RTMS apporte la flexibilité du temps réel sans vrai compromis sur la qualité de la simulation.
RTMS a d’ailleurs été finaliste aux Innovations Awards de SXSW 2018 et je suis allé présenter son fonctionnement lors d’une conférence au SIGGRAPH 2018 à Vancouver. Quelques détails techniques sont aussi donnés dans l’article Nature.
La méthode de simulation de RTMS se base sur 2 concepts : changer de point de vue pour ne pas se placer coté muons mais coté capteurs et simplifier la physique en enlevant les termes négligeables.

3DVF : Peux-tu nous en dire plus sur ces 2 concepts ?
La première idée consiste à penser « récepteur » et non « émetteur » : dans le monde réel, une source lumineuse, par exemple le soleil ou une ampoule, émet des photons qui vont voyager et interagir avec le monde : rebondir sur des surfaces, dévier de trajectoire dans des milieux d’indices de réfractions différentes. Ces derniers vont éventuellement atteindre un capteur (notre œil ou une caméra) pour former une image. Il n’y aura qu’une quantité infime des photons émis qui atteindrons le capteur.
Geant4 utilise une approche similaire pour sa simulation : des muons virtuels avec différentes énergies sont générés à l’extérieur de la pyramide selon une distribution naturelle connue. Chaque muon va avancer pas à pas. A chaque étape Geant4 calcule l’interaction du muon avec la matière pour évaluer sa nouvelle trajectoire et sa perte d’énergie. Au final, les muons qui comptent sont ceux qui atteindront les capteurs virtuels pour former une image. Dans la pratique, la très grande majorité des muons virtuels passerons à côté des capteurs ou auront perdu toute leur énergie avant de les atteindre. Ils ne contribueront donc pas à la simulation.
On peut schématiser le séquençage de cette approche ainsi :
Source => Monde => Capteur
L’approche RTMS utilise le sens de propagation inverse : on se place coté capteur et on évalue les muons qui pourraient l’atteindre en fonction de l’épaisseur et de la densité des objets intermédiaires. Cette approche m’a été largement inspirée par le ray tracing qui tire parti du fait que l’on peut inverser le sens de la lumière : au lieu de penser dans le sens « source de photons vers caméra », on pense « de la caméra vers la source ».
Capteur => Monde => Source
Pour que cela puisse s’appliquer j’ai fait l’hypothèse que les muons virtuels allaient en ligne droite, ce qui est statistiquement vrai. Dans la réalité, ils peuvent aussi dévier légèrement lors de leur interaction avec la matière ce qui peut induire un léger flou sur la muographie (comme du Subsurface Scattering sans que les angles de dispersion ne soient aussi grands). On appelle cet effet la dispersion multiple et RTMS ne la simule donc pas.
Le deuxième facteur qui confère sa rapidité à RTMS est la physique utilisée. Les équations qui décrivent les interactions du muon avec la matière sont très complexes, mais dans le cas des muons à hautes énergies, certains termes deviennent négligeables. La perte d’énergie des muons est alors proportionnelle à la densité de la matière et à la longueur traversée. On appelle opacité ce produit (distance * densité). D’un point de vue physique les différents capteurs de muons ont des matrices de projection similaires à une caméra 3D classique et sont traités comme tels dans le simulateur. Au final, il suffit de calculer l’opacité de la pyramide depuis le capteur (rendu avec un shader spécifique) pour une direction donnée, puis de calculer le nombre de muons qui ont une énergie suffisante pour traverser cette opacité.
Cette méthode se prête bien à la parallélisation et donc au calcul GPU.
Les 2 atouts majeurs de cette méthode sont la simulation temps réel et l’interactivité qui en découle avec un facteur de vitesse de plus d’un million comparé aux simulations sur Geant4. Cette solution offre aussi la possibilité d’utiliser des modèles 3D de plusieurs millions de polygones alors que les modèles Geant4 sont généralement low poly. Enfin, cet outil tourne sur un simple laptop.
Un autre avantage de cette approche est qu’elle calcule directement le flux de muons qui arrive. L’image de la simulation n‘est pas « bruitée » comme à la sortie d’une simulation type Monte Carlo mais lisse comme s’il s’agissait d’un temps de pose infiniment long. Sur cette base, il est ensuite facile d’ajouter la fluctuation statistique qui correspondrait à des temps de pose différents (simuler ce que verrait le capteur au bout de 3,5 ou 100 jours par exemple). Cela permet d’estimer les temps de pose minimaux et les contrastes que devraient créer les structures internes.
Dans les évolutions potentielles, j’aimerais implémenter une nouvelle méthode pour prendre en compte la dispersion multiple afin d’être aussi correct physiquement qu’un Geant4.
Source : Kunihiro Morishima, Mitsuaki Kuno, Akira Nishio, Nobuko Kitagawa, Yuta Manabe, et al.. Discoveryof a big void in Khufu’s Pyramid by observation of cosmic-ray muons. Nature, Nature PublishingGroup, 2017, 542, pp.386-390
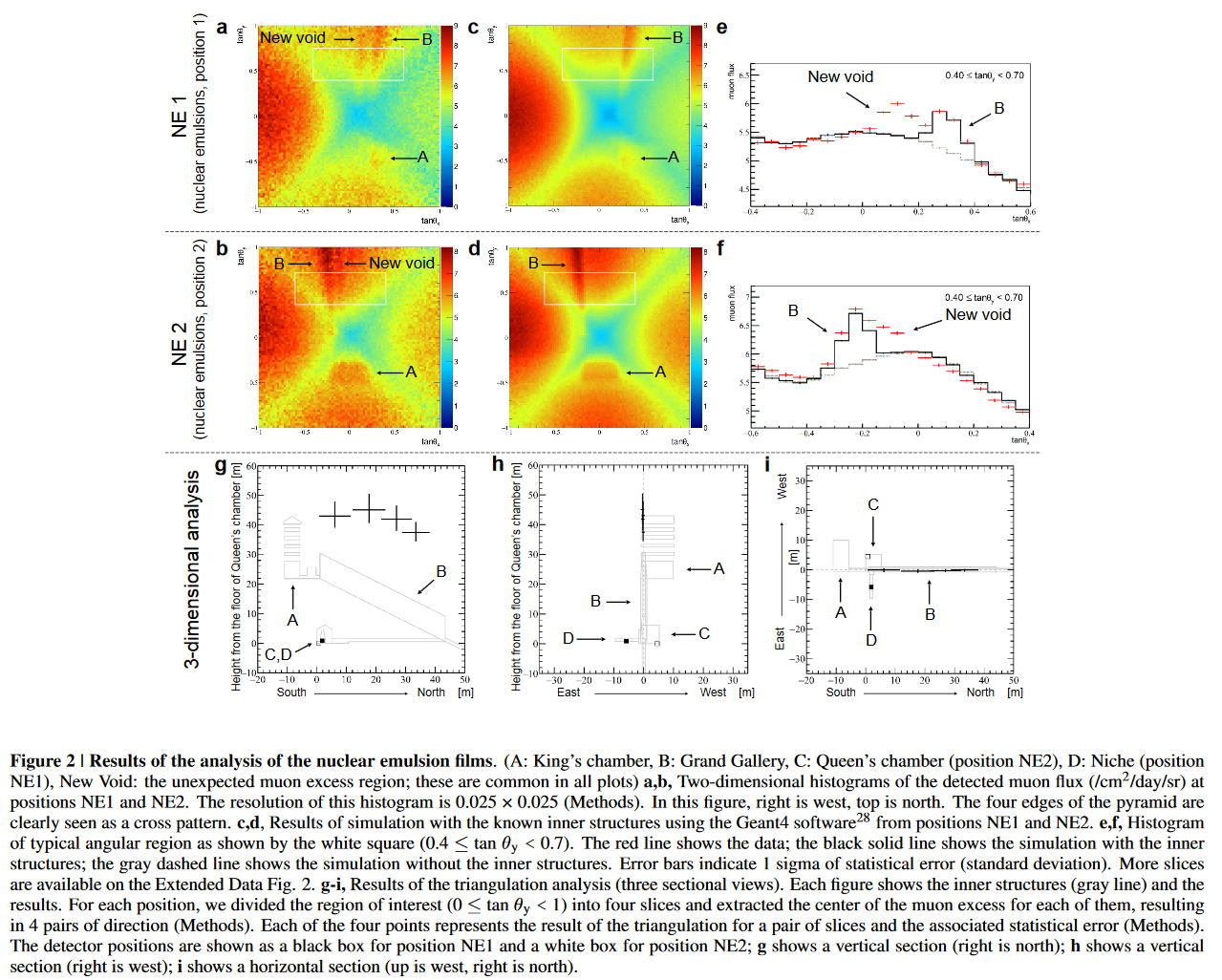
3DVF : L’annonce principale de la mission est donc celle d’un vide important au-dessus de la Grande Galerie, dont la forme exacte et la fonction éventuelle sont encore inconnues. Le futur de la mission pourrait-il permettre de préciser la forme exacte de ce vide, par exemple en multipliant les prises de vue ou en allongeant les temps de capture de muons ?
La mission ScanPyramids continue effectivement avec de nouvelles mesures à d’autres endroits pour préciser des détails sur la forme du vide découvert.
Pour bien progresser dans la connaissance de cette structure nous devons nous adapter à 2 contraintes : on ne peut placer les détecteurs au sein de la pyramide que dans les vides existants, mais ils sont principalement situés dans le même plan vertical nord/sud que le vide détecté. Dans ce cas on observe la cavité d’en dessous ce qui n’est pas idéal pour comprendre sa forme et sa position. Si on veut l’observer de côté il faut alors mettre les capteurs à l’extérieur mais dans ce cas l’épaisseur de matière et l’angle de visée limite fortement le flux de muons.
Le deuxième facteur est le temps d’exposition. Le flux de muons à ciel ouvert est de l’ordre de 10000 par minute et par m². Ce nombre chute lorsque qu’ils traversent de la roche : par exemple moins d’1 muon sur 100 atteindra la chambre de la Reine. En statistique avoir 2 fois plus de données n’augmente que la précision de racine de 2. Autrement dit pour avoir une image 10 fois plus précise il faudrait attendre 100 fois le temps d’exposition initial. Les temps d’exposition actuels sont de l’ordre du mois.
Ce problème de vitesse de convergence est analogue avec les rendus en pathtracing où l’on voit l’image se raffiner avec le temps et converger.
A titre de comparaison, le flux de photons qui arrive sur la terre est de l’ordre d’un trillion (un milliard de milliard) de fois plus important que celui des muons. On comprend alors facilement qu’on puisse prendre une photo en un millième de seconde mais qu’en muographie les temps d’exposition explosent.
3DVF : Certains égyptologues pensent qu’il pourrait s’agir une simple anomalie locale liée par exemple à des trous entre les blocs, l’intérieur du volume de la pyramide étant beaucoup moins « rangé » que sa surface. Disposez-vous de chiffres sur la densité de l’anomalie, qui permettraient d’exclure cette possibilité ? Quelle est la marge d’erreur sur vos mesures ?
Nous avons bien sûr envisagé ces hypothèses. Il y a dans les résultats une cohérence entre la taille physique de la découverte et l’excédent de muons qui l’a traversé. Si on prenait l’hypothèse que le ratio air/pierre soit plus grand qu’à d’autres endroits, disons de 20%, alors le vide trouvé devrait s’étaler sur des hauteurs 4 à 5 fois plus grande, ce qui n’est pas cohérent avec la forme de la tâche observée. Il faut bien le rappeler : cette anomalie est présente uniquement à la verticale de la Grande Galerie, et est donc bien une structure particulière. Si par exemple la volonté des bâtisseurs était d’alléger tout ce qui se trouve au-dessus de la Grande Galerie, alors ce type de structure serait présent dans une zone bien plus large.
Par ailleurs la Grande Galerie est construite selon la méthode de l’encorbellement. Les anciens Égyptiens maitrisaient cette technique depuis longtemps et savaient qu’elle permettait de supporter le poids de pierre au-dessus. Quel serait du coup l’intérêt de décharger une structure conçue pour résister ? Quoi qu’il en soit, les ingénieurs de Dassault Systèmes travaillent actuellement à la réalisation de plusieurs simulations par éléments finis d’hypothèses concernant le Big Void.

3DVF : Est-il prévu de mettre à disposition des chercheurs externes à l’équipe (voire, pourquoi pas, du grand public) certains éléments issus du projet, comme l’outil Unity ou des modèles 3D ?
Nous y réfléchissons actuellement. Il n’est pas exclu que le simulateur serve un jour à la communauté scientifique des muographes puisque le concept est validé. Il est pour l’instant en cours d’amélioration.
3DVF : Enfin, quelles sont les prochaines étapes de la mission ?
Depuis son lancement en Octobre 2015 la mission ScanPyramids a annoncé la découverte de 3 vides inconnus :
• La présence d’un vide sur l’arête Nord Est à 110m de hauteur,
• Une cavité en forme de couloir derrière la zone des chevrons sur la face Nord,
• La présence du Big Void au-dessus de la grande galerie.
Nous cherchons toujours à affiner nos connaissances sur ces structures en prenant de nouvelles mesures.
Pour préciser les caractéristiques du Big Void, nous l’observons depuis d’autres points de vue et notamment depuis les chambres de décharges et la Grande Galerie. Le processus est long il faut être très patient face à un tel monument millénaire.
Pour en savoir plus
– Le site de la mission ScanPyramids propose vidéos supplémentaires, rapports et actualités. Vous y trouverez aussi la liste complète des partenaires du projet.
– La publication liée à la découverte d’un vide dans la grande pyramide est à retrouver chez Nature ou, en accès libre, sur le site de l’INRIA ;
– Le profil de Benoit Marini sur LinkedIn.